MSPO 2016: Chwytak PIAP pomoże usunąć niesprawne satelity z orbity?
Przemysłowy Instytut Automatyki i Pomiarów (PIAP) pokazał podczas Międzynarodowego Salonu Przemysłu Obronnego w Kielcach chwytak robotyczny. Sprzęt ma szansę znaleźć zastosowanie w planowanej przez Europejską Agencję Kosmiczną misji e.Deorbit, której celem jest usunięcie z orbity nieaktywnego satelity Envisat.
Czytaj więcej: Nowy Serwis Specjalny MSPO.Defence24.pl - Najnowsze informacje i analizy z Międzynarodowego Salonu Przemysłu Obronnego w Kielcach. Zapraszamy.
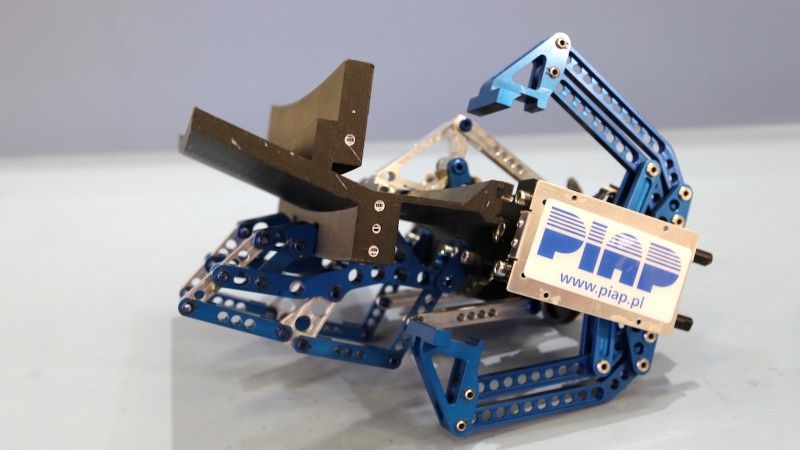
Poświęconą technologiom kosmicznym część stoiska Przemysłowego Instytutu Automatyki i Pomiarów (PIAP) zdominował chwytak robotyczny, którego testy funkcjonalne zakończyły się w połowie 2016 roku. Sprzęt wkrótce zostanie wysłany na testy do ośrodka ESTEC w Noordwijk (Holandia).
Przyrząd opracowano z myślą o usuwaniu z orbity nieczynnych satelitów, które obecnie jako tzw. kosmiczne śmieci stwarzają zagrożenie dla innych obiektów na orbicie okołoziemskiej. Europejska Agencja Kosmiczna (ESA) planuje po roku 2020 misję e.Deorbit, której celem będzie usunięcie z orbity nieczynnego, 8-tonowego satelity Envisat przy przy użyciu specjalnego satelity serwisowego. W związku z tymi planami ESA intensyfikuje programy służące rozwojowi technologii, które w niedalekiej przyszłości umożliwią usuwanie i serwisowanie niedziałających satelitów, w tym Envisata. Kontrakt realizowany przez PIAP został opracowany w ramach programu Polish Incentive Scheme, którego celem jest przygotowania polskiego przemysłu do pełnoprawnego udziału w realizacji kontraktów ESA.
W związku z wymaganiami planowanej misji opracowane w Polsce urządzenie charakteryzuje się modułową budową – składa się z części szybkiej i silnej. Pierwszy element charakteryzuje się bardzo szybkim czasem zaciskania, który wynosi poniżej 2 s oraz możliwością kształtowego adaptowania się do łapanego obiektu. Część silna zaciska się ok. 20 s i jest w stanie przenosić znaczące obciążenia związane z manewrowaniem w kosmosie i deorbitracją. Takie rozwiązanie pozwala na uchwycenie uszkodzonego satelity za adapter mocujący (ang. Launch Adapter Ring). Następnie, według aktualnych planów, satelita serwisowy skieruje się na niższą orbitę i wraz z nim spłonie w atmosferze. Jedną z opcji jest także wielokrotne wykorzystywanie sprzętu ale w związku z tym, że takie rozwiązanie jest znacznie bardziej skomplikowane technicznie będzie również trudniejsze do realizacji.
Warto dodać, że podczas budowy chwytaka dla ESA wykorzystano doświadczenia i niektóre rozwiązania z chwytaków z opracowanych przez PIAP dla mobilnych robotów antyterrorystycznych, które od kilkunastu lat są sprzedawane na rynkach międzynarodowych.
Oglądaj: MSPO 2016: Nowa generacja robotów PIAP w Kielcach [Defence24.pl TV]
W programie e.Deorbit biorą udział także inne polskie podmioty. Spółka GMV jest odpowiedzialna za analizę misji a Centrum Badań Kosmicznych PAN opracowuje analizę obciążeń w trakcie manewru przechwytywania i deorbitacji. Firma Sener POLSKA pracuje z kolei nad przygotowaniem koncepcji tzw. sztywnego przechwycenia przy wykorzystaniu mechanizmu chwytającego. a także wykona projekt wstępny tego rozwiązania. Kontrakt na budowę modelu funkcjonalnego chwytaka zostanie przyznany przez ESA najprawdopodobniej w ciągu roku.
Czytaj też: MSPO 2016: SENER Polska prezentuje komponenty misji kosmicznych
 / MSPO Defence24
/ MSPO Defence24